Dynamic Programming(DP) — 動態規劃(上)

在認識動態規劃之前先來理解 Divide and Conquer(分治法)吧!Divide and Conquer 是一種演算法,執行的步驟如下
- Divide:先將大問題不斷切割成小問題
- Conquer:用遞迴的方式處理所有的子問題
- Combine:將所有的結果合併起來就是最終解答
動態規劃的概念與 Divide and Conquer 的概念相似,會將大問題切割成多個小問題,再將小問題的解答組合起來,不過有些小問題其實是重複的,所以會發生重複計算的問題,這時候動態規劃就會把已經計算過的答案存起來,用空間換取時間,加速執行時間,這就是動態規劃的核心精神所在。
斐波那契數列
斐波那契數列由 0 和 1 開始,之後的斐波那契數列就是由前兩位數字相加而得出 ,也就是第 n 項為第 n-1 和第 n-2 項的總和 — 引用自 wikipedia

ex. 89 = 55+34 (n11 = n10 + n9)
下圖是斐波那契數列遞迴執行的流程圖,每個方格都是一個函式,觀察下圖就會發現有不少重複計算的現象,因此時間複雜度為 O(2ⁿ)。
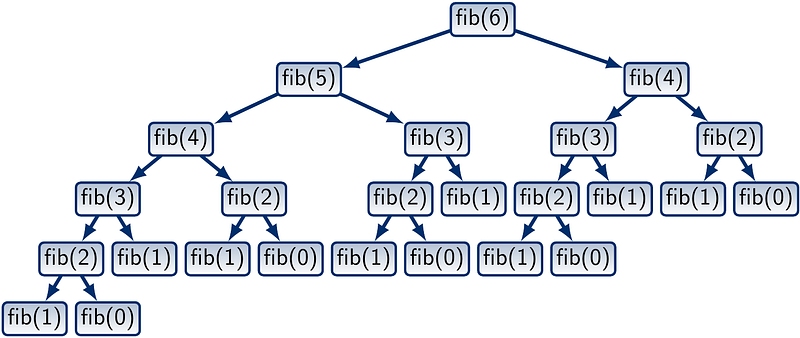
用 js 實作如下
1 | const fibonacci = (i) => { |
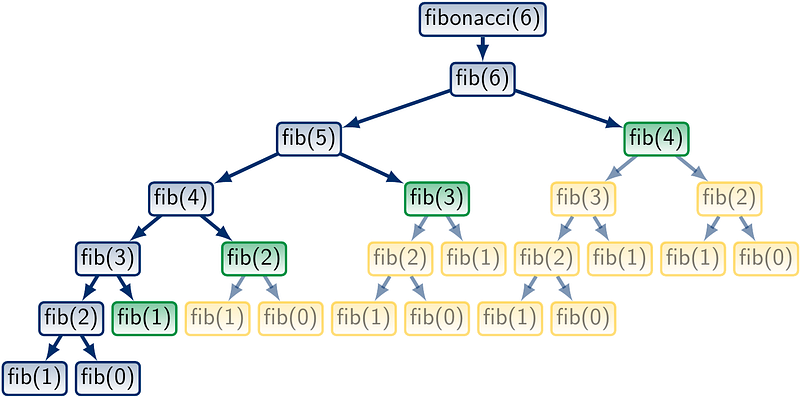
而下圖是 Dynamic Programming 執行的流程,因為藍色區塊已經計算過,並將計算結果暫存起來,所以黃色的區塊不需要重複計算,時間複雜度為 O(n)。
為甚麼稱為動態規劃?
因為宣告存放計算結果的陣列長度是隨著輸入的長度變化,存放的方式又分為兩種 Bottom Up 和 Top Down
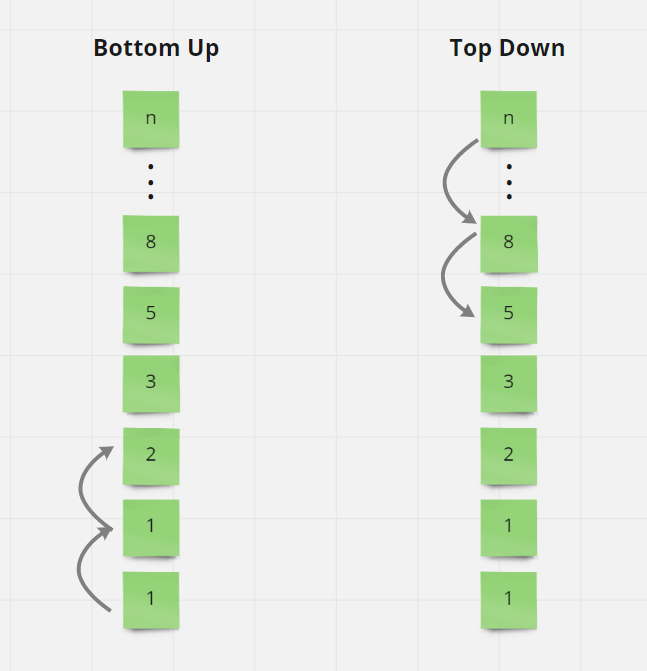
Bottom Up : 使用迴圈,執行順序是由下至上,又稱為 Tabulation,可以想成是從小的問題開始計算,逐步計算到最終要求的值,缺點是可能會計算到沒有用到的子問題。
Top Down : 使用遞迴,執行順序是由上至下,計算過的結果會存起來不會重複計算,這個方法也被稱作 memoization,由於遞迴的執行效率相較於迴圈會來的差,因此這種方法會比 Bottom Up 還要慢,可能會有遞迴過深的問題。
用 js 實作 Bottom Up
1 | const fibonacci = (n) => { |
用 js 實作 Top Down
1 | //Top-Down |
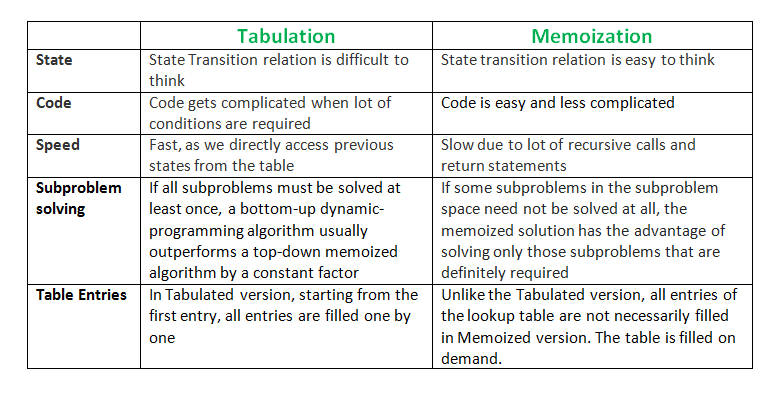
兩者的差異比較如下
動態規劃適用的情境
- 最佳子結構 (Optimal Substructure):問題的最佳解可以從子問題的最佳解推算出來。
- 重疊子問題 (Overlapping Sub-problems):如斐波那契數列出現重複子問題的情形,動態規劃的優勢是可以儲存過計算過的結果,再次遇到相同子問題的時候直接取出儲存的結果,無需重複計算。
- 無後效性(no aftereffect):即子問題的解一旦確定,就不再改變,不受在這之後、包含它的更大的問題的求解決策影響。
參考資料:dynamic-programming-laughlin-lunch-and-learn